
The RabbitHole has several of the Pico-4WD Car kits sold commercially by the SunFounder Company.
Online tutorials and Source Code Repository are available for kit builders and users, thus they are not duplicated here.
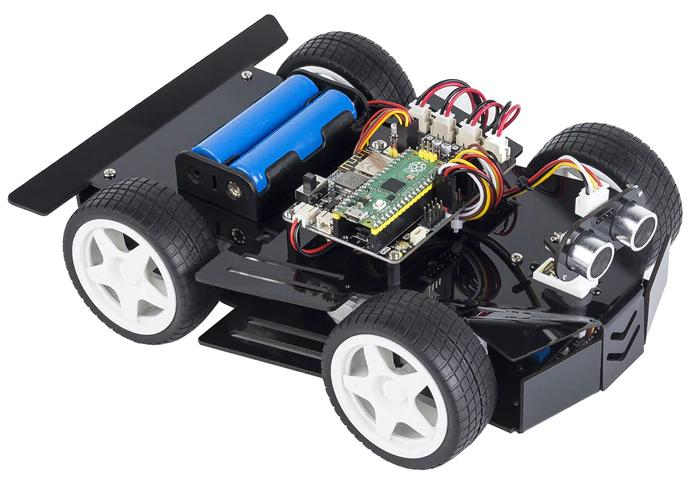
The kits share many of the basic characteristics of our bespoke Robot Buggy with sensors for distance measurement and line tracking added to the basic design.
There are some notable differences however:
- as the name implies, the controlling processor is a RaspberryPi Pico, which has no built-in WiFi capability; WiFi access to the Pico-4WD Car is provided by an ESP8266 chip integrated on the car’s Pico RDP Motherboard. SunFounder’s schematics and drawings are online as downloadable *.zip files.
- and, unlike the two-motor Robot Buggy, Pico4WD is four-wheel drive (perhaps more properly called All Wheel Drive, consistent with automobile descriptions, as each wheel has an independently powered and controlled motor) giving the car more power and hill climbing capability.
During assembly, the online MicroPython code must be downloaded and installed on the car and tested; you will need an Integrated Development Environment (IDE) for this. SunFounder recommends using the Thony IDE that includes the MicroPython compiler.
We have compiled some build notes from our experience assembling, configuring, and using the Pico-4WD Car are here. The build is straightforward and aided by the pre-manufactured chassis, RDP motherboard, and electrical cabling.
When fully tested, have fun with the example programs available on-line including the following:
- DON’T PUSH ME – a program using the car’s grayscale sensor to avoid falling off a cliff (provides edge-detection and self-protection).
- LINE TRACK – a program using the car’s grayscale sensor to follow a pre-defined one-inch track laid out in black tape on a light background.
- BULL FIGHT – uses the car’s ultrasonic range sensor to detect a nearby object, roll up to it, and chase it if it moves. With nothing near it, the “bull” sleeps … when something appears near it, it pursues.
- OBSTACLE AVOID – uses the ultrasonic range sensor to detect objects blocking its path, back up, and scan for a path wide enough for the car to continue moving forward.
And of course, you can write your own programs!
Copyright Notice
All contents including but not limited to texts, images, and code pertaining to the Pico-4WD Car are owned by the SunFounder Company. You should only use it for personal study,investigation, enjoyment, or other non-commercial or nonprofit purposes, under the related regulations and copyrights laws, without infringing the legal rights of the author and relevant right holders. For any individual or organization that uses these for commercial profit without permission, the Company reserves the right to take legal action.
The Chatham RabbitHole makes no claims to ownership to this information. It is published here solely as instructional and educational aids for the enjoyment of the users of the kits purchased for use in this space.